

人形机器人与具身智能产业的机遇与挑战:2025年生态大会圆桌论坛实录
2025年4月25日,由中国机器人网与上海汽车会展中心联合主办的“2025中国人形机器人生态大会”圆桌论坛上,上海交通大学教授陈卫东、优艾智合-西安交大具身智能机器人研究院运营中心主任关健、新时达副总裁刘菁、开普勒中国区业务负责人张梅魁、卓誉科技副总经理李鸿飞等业界专家,围绕人形机器人与具身智能产业的现状与未来展开了深度探讨。以下为论坛核心观点总结:
一、技术挑战:从实验室到规模化应用的鸿沟
1. 场景适配与稳定性问题
李鸿飞指出,尽管大模型推动了人形机器人从“指令式执行”迈向“半自主智能”,但当前技术仍面临场景适配不足的挑战。例如,在马拉松测试中,机器人暴露出易倾倒、驱动器过热等问题,表明其运动控制和散热技术尚未满足实际需求。此外,整机成本高昂也成为企业及个人用户普及的障碍,亟需通过标准化生产降低成本。
2. 系统化优化与生态协同
张梅魁强调,行业需通过生态链协作解决散热、续航等问题,并建议从具体场景倒推技术标准,定义稳定性、智能性等维度的指标,以推动行业标准化进程。刘菁则类比蒸汽机的发展历程,认为技术迭代需时间积累,需全链条优化零部件(如电机散热)、整机设计及大模型协同能力,同时依赖政策引导资源投入。
二、形态之争:人形是否为终局?
1. 短期形态多样化
关健提出“适者生存”原则,认为机器人形态应由场景需求决定。例如,平坦场景中轮式底盘更高效,而复杂环境可能需要多臂设计。他预测未来趋势为“共性大脑(大模型)+多元形态”,即通过统一智能系统适配不同场景的硬件形态。
刘菁补充称,短期可允许“阉割版”机器人(如单臂或狗形)探索最优组合,但长期可能收敛于人形结构,因其兼容性高且标准化后更易量产。
2. 人形化的长期逻辑
张梅魁和李鸿飞均认为,人形是适配人类环境的“最简解”。大模型的训练数据基于人类视角(如视觉高度),且人形机器人可覆盖更多工作场景,技术突破后或成为终极形态。
三、应用前景:3-5年内的突破方向
1. ToB场景优先落地
专家一致认为,工业与商业场景是近期重点。李鸿飞提出,低容错率的简单工业任务(如重复搬运)和容错率高的商业场景(如零售摆货)将率先突破。刘菁则强调需解决工业机器人现有痛点,例如通过“机械臂+大模型”组合提升复杂任务能力。
2. ToC场景的渐进渗透
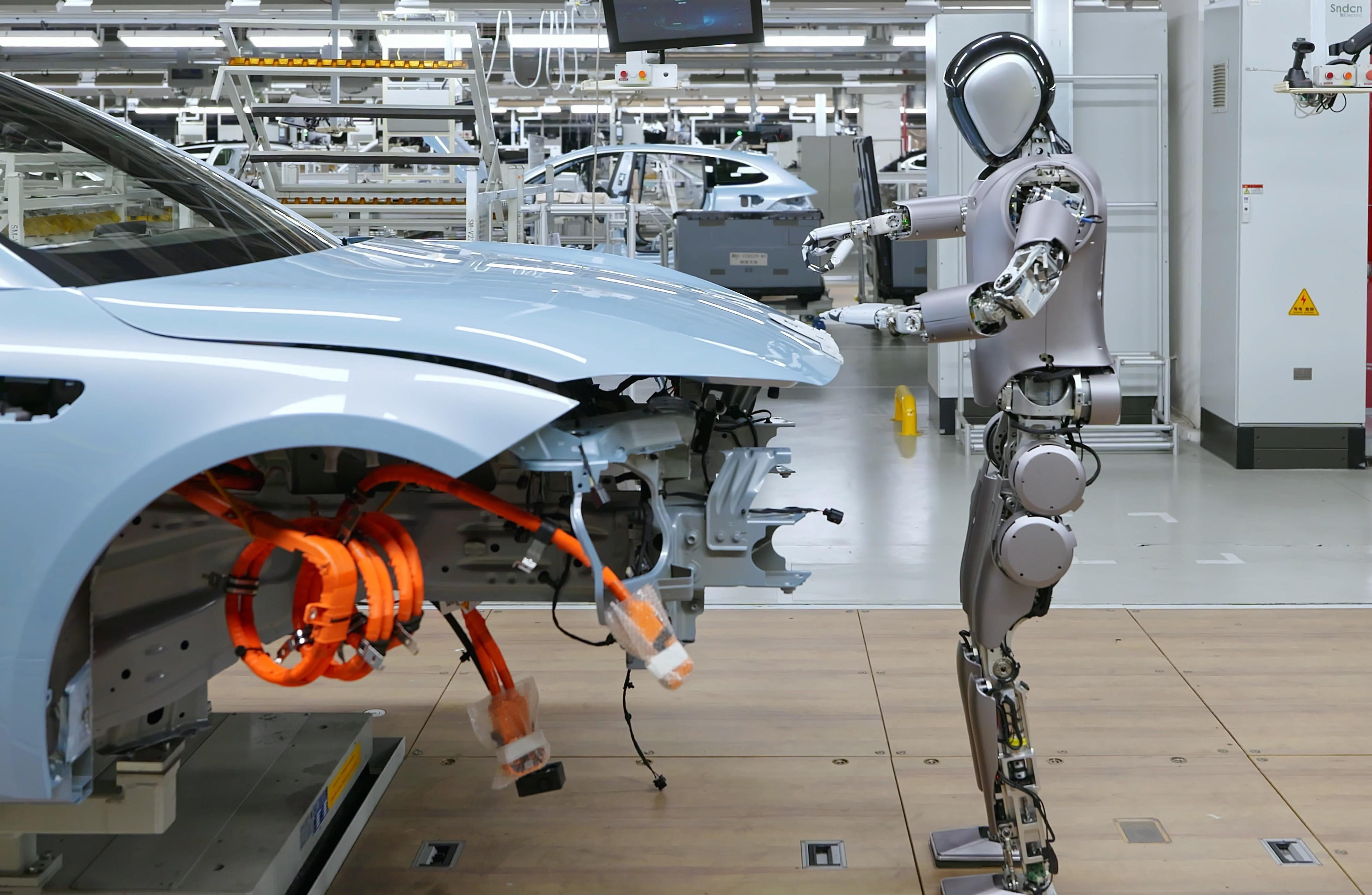
张梅魁指出,家庭服务等消费场景需优先突破封闭、重复性任务(如清洁),通过硬件简化与数据积累逐步迭代。例如,特斯拉通过生产线自训练优化模型,为家庭场景提供参考。
四、未来展望:生态共建与技术普惠
1. 产业链协同与技术普惠
关健呼吁生态链协同推动技术革命,刘菁则预测人形机器人可能成为继3C、汽车后的第三大制造业终端,形成万亿级市场。张梅魁提出行业需“仰望星空+脚踏实地”,联动上下游突破技术与成本瓶颈。
2. 从工具到智能体的进化
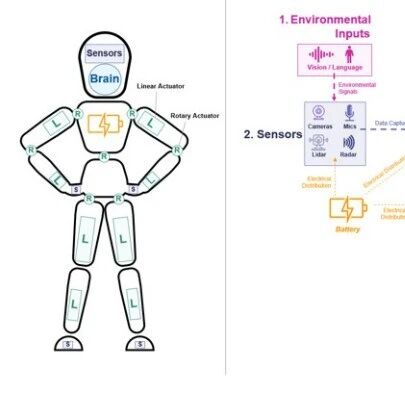
优艾智合在工业场景的实践(如配电间巡检机器人ARIS-HSR)展示了具身智能的潜力。通过分布式机器人矩阵与中枢系统协同,企业已实现效率提升与故障预测能力突破。这印证了关健的观点:具身智能的核心在于“感知-决策-执行”闭环,而非拘泥于人形载体。
人形机器人与具身智能的融合,不仅是技术的突破,更是生产力变革的起点。正如专家所言,行业需平衡短期务实与长期愿景,通过场景驱动、生态协同与技术普惠,逐步实现从实验室到千家万户的跨越。这场论坛的讨论,为未来十年中国机器人产业的发展提供了关键路标。
















请先 登录后发表评论 ~